
Comment la voiture autonome peut-elle remplacer le conducteur humain ?
Depuis 1997, différents tests et prototypes ont été réalisés par différents ingénieurs et entreprises pour mener à ce que l’on appelle aujourd'hui la voiture autonome. Ce que l’on appelle une voiture autonome est un véhicule capable de rouler sans l’intervention d’un être humain. Grâce à de nombreux capteurs et à un logiciel de calcul particulièrement élaboré, elle est capable de se déplacer dans le trafic et de prendre des décisions toute seule, sans l’apport d’un conducteur.

L’informatique embarquée
Coordination environnement/voiture
L’algorithme et l’ordinateur de bord
Les algorithmes sont présents dans toutes machines comportant un ordinateur. L’algorithme est exécuté au lancement de la machine et permet de définir son action. L’algorithme dans la voiture autonome est géré par l'ordinateur de bord. Il permet à la voiture de se gérer toute seule sans l’intervention de l’humain, mais cet algorithme a des limites car il n’a pas de réflexes comme des humains et, dans le cas d'un accident par exemple, il pourrait être amené à choisir entre tuer les passagers ou des piétons, ce qui pose beaucoup de questions pour les constructeurs qui doivent programmer ce genre de choix.
L’autonomie d’une voiture se juge sur 5 niveaux, le niveau 1 est un système d’assistance au freinage (ABS) et correction de la trajectoire, le niveau 2 est le régulateur de vitesse et le maintien automatique dans la file, le niveau 3 est la conduite autonome sur autoroute, le niveau 4 est la conduite autonome partout mais avec un conducteur et le niveau 5 est le conduite autonome sans conducteur.
L'algorithme permet de décrypter les informations reçues grâce aux différents capteurs de la voiture autonome. Aujourd’hui, pour le grand public, les voitures sont seulement autonomes sur les autoroutes ou les grandes lignes droites. Grâce aux capteurs, l’algorithme peut modéliser la route et voir les autres véhicules. Dans le futur, les véhicules autonomes pourront interagir entre eux, ainsi le véhicule pourrait savoir qu’il y a un autre véhicule après le virage, ou voir l'image de la caméra du camion qui le précède par exemple. L’ordinateur de bord quand à lui lance l’algorithme (pour le véhicule) et l'affichage des interfaces (pour le conducteur et les passagers). L’ordinateur a besoin d’une grande puissance de calcul pour pouvoir gérer tout l’environnement en même temps et ainsi rouler en respectant le code de la route.
Aujourd’hui, les constructeurs de voitures autonomes rencontrent des problèmes éthiques. Par exemple, si un accident est déclenché suite à une erreur du logiciel, ou dans le cas d'un accident inévitable, si l’algorithme peut avoir le choix entre écraser un cycliste avec casque ou un autre sans casque, une personne âgée ou un jeune. Les constructeurs doivent répondre à cette question car l’algorithme ne réagit pas de la même manière que l’humain, il ne réagit pas par réflexe donc tout doit être prévu à l'avance dans l’algorithme. Aujourd’hui, s’il y a un accident lors d’une conduite autonome, le seul responsable est le conducteur, car les constructeurs veulent que le conducteur reste vigilant. Mais dans les années à venir, lorsque le véhicule sera entièrement autonome, la faute pourrait être celle du constructeur.
L’ordinateur de bord, quand à lui, est l'interface que voient le conducteur et les passagers. il leur permet de contrôler les paramètres de la voiture. C’est lui qui permet de choisir de passer en mode autonome ou pas. On peut aussi paramétrer des choses comme dans une voiture normale comme la ventilation ou le GPS. Aujourd’hui, Nvidia a dévoilé un ordinateur de bord permettant d’avoir assez de puissance pour les véhicules autonomes de niveau 5.

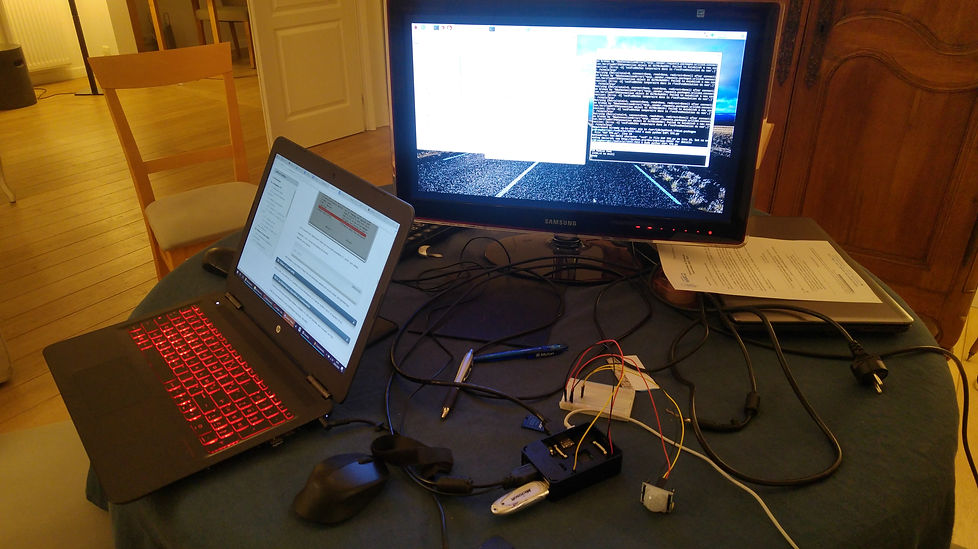
L'expérience
L’expérience que nous avons réalisée consiste à montrer comment fonctionne un capteur et un algorithme. Pour cette expérience, nous avons utilisé un Raspberry PI. Le Raspberry Pi est un nano-ordinateur monocarte à processeur ARM. Il fut conçu par le créateur de jeux vidéo David Braben, dans le cadre de sa fondation Raspberry Pi2.
Ce nano-ordinateur, qui a la taille d'une carte de crédit, a été conçu pour encourager l'apprentissage de la programmation informatique; il est compatible avec de nombreux systèmes d'exploitation dont Linux-Debian ou les système d’exploitation microsoft. Il est fourni avec une carte mère seule, sans boîtier, ni alimentation, ni clavier, ni souris ni écran, pour réduire les coûts de vente et ainsi permettre à un plus grand nombre de personnes d’en acquérir un. Il faut aussi des composants comme des câbles pour brancher les différents récepteurs.
Le capteur PIR est un capteur qui détecte les variations d’ondes infrarouge dans un lieu. Il est généralement utilisé dans les systèmes d’alarme pour détecter les variations de température dans une pièce.
Nous avons utilisé aussi une breadboard, des fils de raccordement et un capteur PIR pour réaliser notre expérience.
Dans cette expérience, nous cherchons à montrer comment le capteur peut détecter un corps grâce aux infrarouges.
Il faut aussi utiliser un algorithme pour pouvoir faire fonctionner le montage. Quand le capteur détecte un corps, le capteur PIR envoie un signal à l’ordinateur qui va être exploité par notre algorithme. Nous avons donc montré l’utilité du capteur infrarouge pour détecter des corps.
Protocole :
-
rouge : PIR-VCC (alimentation 3 à 5 VCC) ;
-
brun : PIR-OUT (sortie numérique) ;
-
noir : PIR-GND (masse).
Branchez la partie mâle du fil de raccordement PIR-VCC à la ligne d'alimentation de la plaquette (la ligne rouge verticale), le fil de raccordement PIR-GND à la ligne de masse (la ligne bleue verticale) et le fil de raccordement PIR-OUT à l'un des jeux de trous libres de la plaquette.
Utilisez un fil noir pour raccorder la broche n° 6 « GPIO-GND » du Rapsberry à un trou de la ligne de masse de la plaquette sur laquelle le fil PIR-GND est déjà relié.
Utilisez un fil rouge pour raccorder la broche n° 2 « GPIO 5V » à la ligne d'alimentation de la plaquette sur lequel le fil PIR-VCC est déjà relié.
Connectez avec un dernier fil, la sortie PIR-OUT à la broche n° 26 « GPIO 7 ».
Algorithme :
Nous avons commencé par installer Raspbian (un système d'exploitation basé sur Linux et adapté au Raspberry PI) en le copiant sur une carte SD sur lequel l'ordinateur a démarré.
Il a fallut installer un driver pour configurer le port GPIO (pour pouvoir dialoguer avec les périphériques).
L'algorithme a été écrit en langage Python. Ce langage est un langage objet, beaucoup utilisé et qui peut s'exécuter sur Windows et Linux. L'interpréteur de Python est installé nativement sur Raspbian.
Déroulement de l'expérience :
L'algorithme a été exécuté mais les mouvements n'étaient jamais détectés. Il a fallu résoudre plusieurs problèmes, il y a plusieurs modèles de Raspberry PI, et les connexions sont différentes sur chaque modèle.
Ensuite l'algorithme détectait toujours les mouvements même sans obstacle. Il a fallu régler les deux molettes du capteur PIR.
La première règle la sensibilité du capteur pour qu'il ne soit pas trop sensible, la deuxième règle la durée pendant laquelle le signal de détection de mouvement est envoyée à l'ordinateur. Il a fallu le réduire pour que quand un mouvement est détecté, le capteur l'envoie pendant 1 seconde environ.
Explication de l'algorithme :
- Initialisation du port GPIO pour communiquer avec l'algorithme, et définition du port utilisé (7)
- Try : l'algorithme s'execute tant qu'il n'est pas interrompu par une erreur ou un événement
- On affiche à l'écran un texte pour dire que l'algorithme est prêt
- On fait une boucle infinie (while true) pour attendre toujours un signal du capteur
- si un signal est détecté, on l'affiche à l'écran
- On attend une seconde avant de recommencer d'interroger le capteur.
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
PIR = 7
GPIO.setup(PIR, GPIO.IN)
try:
print("PIR Module Test")
print(" (CTRL+C to exit)")
time.sleep(2)
print "Ready"
while True:
if GPIO.input(PIR):
print("Mouvement détecté! ")
time.sleep(1)
except KeyboardInterrupt:
print("Quitting")
GPIO.cleanup()



Adaptation à la voiture autonome
Cette expérience peut s’adapter à la voiture autonome puisqu’elle montre comment un capteur infrarouge détecte les variations de température.
Sur la voiture, cette expérience peut montrer l’importance de ce système au cas ou un piéton traverserait la route sans regarder. Ce système permettrait d’arrêter la voiture si le capteur détecte un piéton.
En conclusion cette expérience montre l’utilité des capteurs dans une voiture autonome.
Le fonctionnement mécanique
Les capteurs
Le capteur à ultrasons
Définition d’un capteur à ultrasons :
Les capteurs à ultrasons fonctionnent en mesurant le temps de retour d’une onde sonore inaudible par l’homme émise par le capteur. La vitesse du son étant à peu près stable, on en déduit la distance à l’obstacle.
Fonctionnement d’un capteur à ultrason :
Un capteur à ultrasons émet à intervalles réguliers de courtes impulsions sonores à haute fréquence. Ces impulsions se propagent dans l’air à la vitesse du son. Lorsqu’elles rencontrent un objet, elles se réfléchissent et reviennent sous forme d’écho au capteur. Celui-ci calcule alors la distance le séparant de la cible sur la base du temps écoulé entre l’émission du signal et la réception de l’écho.

La distance étant déterminée par le temps de propagation des ultrasons et non par leur intensité, les capteurs à ultrasons conviennent parfaitement à une suppression d’arrière-plan. Pratiquement tous les matériaux qui reflètent le son peuvent être détectés, quelle que soit leur couleur, leur composition, ou leur taille. Même les matériaux transparents ou les feuilles minces ne représentent aucun problème pour un capteur à ultrasons.
Les capteurs à ultrasons Microsonic sont disponibles pour des portées de 20 mm à 10 m et, du fait même de leur principe, donnent la valeur mesurée au millimètre près. Certains capteurs peuvent même atteindre une précision de 0,025 mm. Les capteurs à ultrasons peuvent voir à travers l'air chargé en poussières et les brouillards d'encre. Même les dépôts minces sur la membrane du capteur ne nuisent pas à son fonctionnement.
Les capteurs avec une zone morte de seulement 20 mm et un faisceau extrêmement étroit trouvent aujourd'hui des applications inédites : mesure du niveau de remplissage des orifices de plaques d’analyses ou de tubes à essai, ainsi que la détection des petites bouteilles dans l'industrie de l'emballage. Ils peuvent être mis en oeuvre avec facilité. Même les fils minces sont détectés de manière fiable.
Application des capteurs à ultrasons à la voiture autonome :
À cause de la faible portée des capteurs à ultrasons, ceux ci sont utilisés généralement pour l’aide au stationnement. Ainsi la voiture autonome peut détecter les obstacles environnant et se garer facilement.
Les radars et les lidars
-
Le principe général du LiDAR :
Le LiDAR, soit « Light Detection And Ranging» (Détection de la lumière et mesure à distance) est une technique de Mesure Electronique de Distance (MED) permettant de mesurer la distance entre la surface d’un objet et l’appareil (émetteur/récepteur) grâce aux propriétés des faisceaux de lumière.
Le principe du LiDAR est similaire à celui du Radar, tous deux envoient une impulsion de radiation électromagnétique sur une cible ou un obstacle. L’onde est réfléchie vers la source émettrice. En connaissant la vitesse de propagation de l’onde émise, on est ainsi capable de calculer la distance qui sépare la cible de l’émetteur. À la différence du radar qui fonctionne dans le domaine des micro-ondes (fréquences de 1 à 100 GHz) ou du sonar qui utilise des ondes sonores, le LiDAR utilise de la lumière et plus précisément des lasers rayonnant dans le domaine infrarouge, le domaine visible ou le domaine ultraviolet (fréquences supérieures à 10 THz). De plus, le LiDAR, puisqu'il fonctionne à partir d’un laser, travaille avec des longueurs d’ondes optiques, c’est-à-dire des longueurs d’ondes qui vont de quelques centaines de nanomètres à quelques microns. L’onde émise est donc cohérente et polarisée.
Rappel : Deux sources sont cohérentes si elles émettent des ondes sinusoïdales de même fréquence et si le retard de l'une par rapport à l'autre ne varie pas au cours du temps. La lumière est une onde électromagnétique. Les ondes les plus simples qui décrivent la lumière sont les ondes polarisées linéairement.
Le principe de la mesure LiDAR requiert généralement l’utilisation d’un laser impulsionnel. A l'inverse d'un laser conventionnel, qui produit habituellement un rayonnement continu, le laser impulsionnel produit des flashs de lumière régulièrement espacés dans le temps et très brefs, que l’on appelle impulsions. Chaque impulsion dure de quelques femtosecondes (fs) à 100 fs.
Un LIDAR est composé principalement de 2 éléments : un émetteur laser (fonction d’émission) qui envoie un signal lumineux et un télescope (fonction de réception) comprenant un collecteur de lumière qui reçoit la lumière réfléchie. Le signal reçu doit être analysé, ainsi on trouve après le télescope un système électro-optique d’acquisition : un photo-détecteur qui transforme la lumière en signal électrique ainsi qu’une chaîne électronique qui traite ce signal pour obtenir l’information recherchée.

Schéma d'un système LiDAR et du principe de la mesure
La diversité d’application des LiDAR :
Mesure de distance : La distance est donnée par la mesure du délai entre l’émission d’une impulsion et la détection d’une impulsion réfléchie, en connaissant la vitesse de la lumière.
Mesure de vitesse : La mesure de vitesse emploie un laser à spectre d’émission fin avec une fréquence bien déterminée. L’effet Doppler-Fizeau (le décalage de fréquence d’une onde (mécanique, acoustique, électromagnétique ou d'une autre nature) observé entre les mesures à l'émission et à la réception ) permet de déterminer la vitesse de l’objet.
Mesure de température, de concentration, de densité : Grâce à cette méthode, plusieurs autres paramètres peuvent être observés et mesurés si l’on sait isoler l’effet des différentes interactions entre la lumière et la matière le long du faisceau laser.
La diversité des domaines d’applications :
➢ Topographie
- Falaises, pentes raides
- Infrastructures (routes, rails, …)
- Mobiles terrestres urbains
- Hydrologie
➢ Géosciences :
- Risque sismique
- Météorologie
- Physique de l’atmosphère
➢ Sciences de l’environnement
- Etude de la pollution atmosphérique
- Agronomie : Le LiDAR peut être utilisé pour aider les agriculteurs à déterminer les zones des parcelles sur lesquelles ils doivent répandre plus d’engrais afin d’obtenir un meilleur rendement agricole pour leurs cultures. Le LiDAR peut créer une carte topographique des champs et ainsi révéler les pentes et l'exposition au soleil.
➢ Infrastructure de transport
- La régulation du trafic aérien
- Le guidage automatique de véhicules terrestres ou spatiaux
- La sécurité routière : Les LiDAR sont utilisés par les gendarmes pour contrôler la vitesse des véhicules.
➢ Patrimoine et Archéologie :
Le LiDAR est utilisé pour la détection de sites enfouis sous la végétation ou l’eau.
➢ L’optimisation de parcs éoliens
Le LiDAR peut être utilisé pour augmenter la production d'énergie d’un parc éolien en mesurant avec précision les vitesses et les turbulences du vent.
Diversité d’émission : L’éloignement de la cible va de quelques dizaines de centimètres à plusieurs centaines de milliers de km (calcul de la distance terre- lune)
Diversité de taille : La taille du LiDAR va de l’occupation d’un bâtiment entier au LiDAR portable.
Diversité des types de lasers utilisés : à gaz, à colorant, à solide, à semi conducteur, accordable ou non, pulsé ou continu.
LES DIFFÉRENTS TYPE DE LIDAR ET MODES DE FONCTIONNEMENT
-
LiDAR à cible dure
Le télémètre laser
Les LiDARs peuvent être catégorisés en fonction de leurs fonctions, ici nous étudierons le télémètre laser qui a pour fonction la mesure de distance.
Le télémètre laser fonctionne selon le principe d’un radar, une impulsion est envoyée puis réfléchie par un objet. Le signal retour est ensuite détecté puis traité de manière à avoir une distance entre le télémètre et la cible.

Les ondes émises sont généralement dans l’ordre de quelques kHz à plusieurs THz. C’est pourquoi on parle de télémètre laser qui émet dans la partie visible ou infrarouge du spectre.
Il existe plusieurs façons de mesurer la distance grâce au même système.
Une première approche est de calculer le temps entre l’aller et le retour de l’impulsion. Cette approche est dite télémétrie temps de vol, un chronomètre est déclenché au moment où l’impulsion est envoyée, puis arrêté au moment de sa détection.
Une autre manière de calculer peut se faire par l’utilisation de la télémétrie laser à triangulation qui consiste à calculer la distance grâce à la position du rayon retour sur le capteur et l’angle de celui-ci.

La télémétrie laser est un moyen très pratique de mesurer des distances, néanmoins cette méthode présente des incertitudes liées à différents facteurs.
Tout d’abord la cible sur laquelle est projeté le rayon n’est pas toujours lisse ou verticale, ainsi en fonction de l’inclinaison ou de l’irrégularité de la cible, la distance ne sera pas calculée très précisément.
En plus de ces incertitudes, le signal envoyé par l’émetteur peut être perturbé par l’air qui doit être traversé, le signal peut perdre en précision et le télémètre donner des mesures encore une fois moins précises.
Le télémètre laser permet donc d’obtenir la distance en un point précis de l’espace. Pour pouvoir obtenir une multitude de points, le télémètre à balayage est intéressant.
Celui-ci utilise un miroir rotatif permettant l’envoi d’une sorte de nappe laser et ainsi la mesure de plusieurs points. Cet appareil permet de fournir une carte en trois dimensions, grâce aux points recueillis on peut donc détecter des obstacles ou cartographier un environnement.
4. Intérêt, avantage et inconvénient du LiDAR :
Les LiDARs deviennent des instruments importants répondant aussi bien à des objectifs scientifiques de connaissance de l’atmosphère qu’à des besoins de mesure et de contrôle de l’environnement. En effet, de nombreux avantages le placent comme un capteur indispensable, d’où la multiplication de réalisations et de projets de LiDARs. Un avantage du LiDAR est une grande précision dans la mesure de distance (une précision de l’ordre du centimètre), grâce aux très courtes durées d’impulsions.
Un deuxième avantage est l‘indépendance à la luminosité. On peut effectuer certaines mesures en plein jour ou la nuit. Le LiDAR utilise un capteur d'éclairage actif dont les données peuvent être récupérées jour et nuit, ce qui n'est pas toujours le cas d'autres techniques. Un autre atout du LiDAR est la rapidité d’acquisition et de traitement des données avec une extrême précision. Il est donc possible d’obtenir une cartographie 3D en temps réel grâce à un seul instrument LiDAR.
Le premier inconvénient du LiDAR est son prix élevé. Les systèmes Lidar mécaniques, présents aujourd’hui, peuvent coûter jusqu’à 75 000 euros ce qui rend leur application en série impossible. Autrement dit, ce prix est donc rédhibitoire pour l’équipement d’une voiture commercialisée en grande série. De plus, l’encombrement et la consommation d’énergie élevés limitent son utilisation sur un véhicule pour aujourd’hui.
Les LiDARs sont sensibles aux conditions atmosphériques. Ainsi par temps de pluie ou de brouillard, le faisceau peut être perturbé, à cause du principe de réfraction : lorsque le rayon traverse un milieu différent (comme une goutte d’eau), la vitesse de l’onde change, et ainsi la superposition de différente couche de différents milieux rend approximatif l’évaluation de la distance.
Application à la voiture autonome :
La principale problématique de la conduite autonome des véhicules intelligents concerne la perception de l’environnement à chaque instant, la localisation et l’orientation d’objets mobiles. Pour obtenir ces informations, on peut appliquer la technologie LiDAR à l’odométrie.
L’odométrie est une technique consistant à déterminer une estimation de la position future d’un véhicule à partir de sa position courante. En partant d'une position initiale connue et en intégrant les déplacements mesurés, on peut ainsi calculer à chaque instant la position du véhicule.
Le LIDAR intervient alors à ce moment, l’onde émise par le récepteur du LIDAR sera réfléchie par les objets rencontrés lors de son déplacement. La distance d’un objet réfléchissant peut-être obtenue à partir de la différence de temps entre l’émission d’une onde et la réception de l’écho le plus important. Ainsi on aura la position de notre véhicule autonome.
Il est également possible avec ce système en émettant de nombreuses ondes de localiser l’ensemble des échos afin de cartographier la surface de l’objet réfléchissant et donc de modéliser l’espace entourant le véhicule, c’est ce point essentiel qui permet de détecter les différents obstacles de la route. Cependant, ces derniers effectuent des balayages sur une seule nappe, c’est-à-dire un plan, et ne permettent donc pas d’avoir accès à une représentation 3D détaillée de l’environnement qui nécessite plusieurs lignes de niveaux. Pour pallier à cet inconvénient il est possible par exemple de faire osciller le LiDAR afin de couvrir plus de nappes ou d’utiliser des miroirs pivotant pour dévier les nappes. Malheureusement ce genre de système est beaucoup trop volumineux et impossible à intégrer à un véhicule autonome. La solution choisie est donc d’intégrer plusieurs LiDAR simples couvrant plusieurs couches au fonctionnement de détection du véhicule. Cependant la représentation de l’espace reste moins précise qu’avec les systèmes de types caméra. Mais cette imprécision est compensée par le temps de traitement bien plus rapide avec un LiDAR. De ce fait au sein d’un véhicule autonome on retrouve souvent une caméra de recul plus précise pour les manœuvres et des LiDARs pour les opérations plus simples.

Les caméras

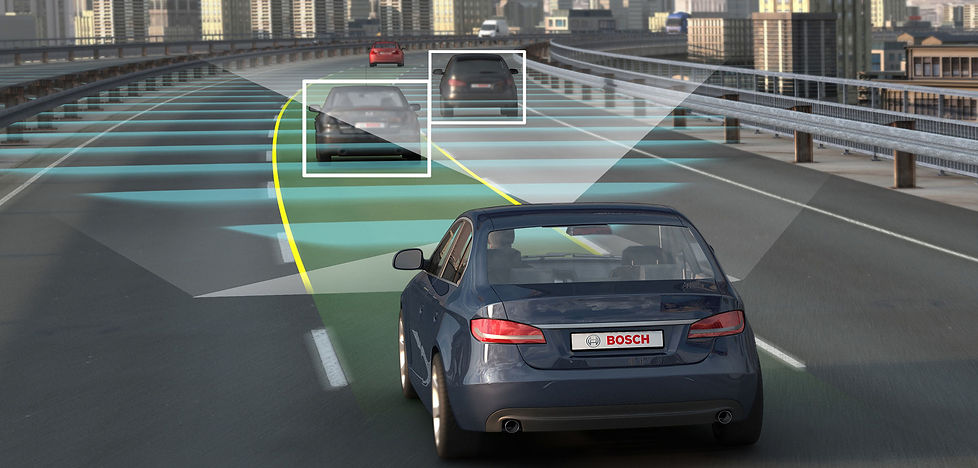
Emplacements et rayon d’alerte des différents capteurs et caméras de la voiture autonome.
Il y a différentes caméras sur la voiture autonome, celles-ci ont toutes un rôle précis et défini dans le cadre de la conduite de la voiture autonome.
La stéréovision sert exclusivement à éviter les obstacles pour se garer, à détecter les feux ainsi que les panneaux de signalisation et à filmer la route en relief grâce à plusieurs caméras qui filment plusieurs points de vue différents.
Triangulation
La triangulation permet grâce à trois satellites fixes qui connaissent leur position exacte de déterminer la position d'un point précis sur terre. Chaque satellite du réseau GPS possède une horloge atomique de grande précision. Elles promettent une mesure du temps avec une précision extraordinaire : une dérive inférieure à 1 seconde toutes les 30 millions d'années. Leur précision et leur stabilité sont telles qu'elles constituent aujourd'hui les étalons de temps et c'est pourquoi on les utilise pour définir la seconde depuis 1967. C'est en effet lors de la 13e Conférence générale des poids et mesures qu'il a été décidé que la seconde était la durée de 9.192.631.770 périodes de la radiation correspondant à la transition entre les deux niveaux hyperfins de l'état fondamental de l'atome de césium 133. De quoi synchroniser les milliards d'échanges qui ont lieu quasi simultanément sur le Web ou les satellites au cœur du système GPS. Un problème était survenu durant la conception du GPS : il aurait fallu que le point qu'on veut localiser sur terre possède aussi une horloge atomique pour pouvoir faire des calculs précis. C'est pour cela que l'utilisation d'au moins un quatrième satellite est nécessaire pour pouvoir donner l'heure exacte à la voiture.
Différentes étapes de la triangulation :
Dans un premier temps, un satellite émet son signal vers le récepteur GPS qui le reçoit. Le GPS calcule ensuite grâce à une opération simple T1-T2=T qui est le temps qu'a mis le signal pour parvenir à la voiture, sachant que la vitesse du signal est de 299 792,458 km/s. Cela permet grâce à la relation Distance=Vitesse x Durée
qui va permettre de déterminer un cercle de rayon D. Mais pour l'instant, chacun des points de cercle est susceptible d’être la localisation de la voiture.
En faisant de même avec un second satellite, il détermine une deuxième sphère qui coupe la première en un plan sur lequel est situé le GPS.


Comme précédemment chacun des points de ce plan est une position plausible de la voiture.
Pour terminer, un troisième satellite est nécessaire afin de trouver la position exacte sur le plan. La troisième sphère coupe le plan et donne deux points. Dans le cas où l'utilisateur se situe sur la surface de la terre un seul des deux points et cohérent. On peut donc éliminer un des deux points, il n'en reste donc plus qu'un qui est donc la position de la voiture sur terre.
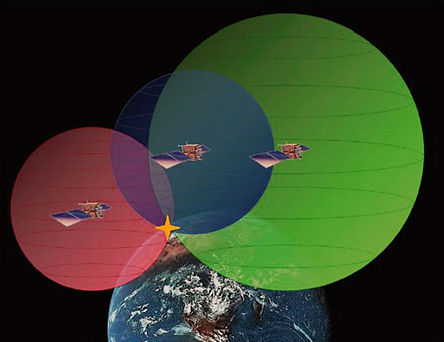
Autour de la terre gravite plus de 24 satellites à une altitude d'environ 20 000km
Ils effectuent exactement 2 tours par jour au-dessus de nos têtes. Où que vous soyez sur le globe, vous êtes en vue directe d’au moins 4 de ces satellites, et généralement plutôt d’une dizaine. Ce qui permet de localiser quasiment n'importe quel point sur terre
Pourquoi avons nous besoin d'une telle précision ?
Le signal émis par le satellite se propage a 299792,458 km/s et pour pouvoir correctement guider l'utilisateur dans le cas d'un déplacement en voiture. Une précision de l'ordre du mètre est nécessaire (pas plus de 10m). Cette distance est parcourue en 30 milliardième de secondes par le signal. Or un décalage d’un millionième de seconde entraîne une erreur sur la position de trois cents mètres ».
A la vitesse de la lumière : d = c× t = 3×108 × 1×10-6 = 3×102 = 300 m
L'horloge doit donc être précis à 30 nanosecondes près. Cette précision est possible grâce aux travaux d'Albert Einstein.
Les corrections relativistes
Pour fabriquer des horloges atomiques précises à 30 nanosecondes, il faut comprendre exactement comment le temps s’écoule. Or avec ses théories de la relativité restreinte et générale, Einstein a découvert que l’écoulement du temps cache quelques subtilités.
Premier élément à prendre en compte : le temps est ralenti pour les objets en mouvement. Cet effet a été prédit par Einstein à partir de sa théorie de la relativité restreinte publiée en 1905. Nos satellites se déplacent en orbite à 3,85 km/s
Le temps mesuré par une horloge embarquée dans un satellite est appelé « temps propre » du satellite. Le mouvement du satellite par rapport à la Terre est à l’origine d’une différence de temps . Pour un observateur terrestre, le temps mesuré par une horloge dans le satellite est plus long que celui mesuré par une horloge terrestre qui mesure le temps propre sur Terre.
Avec v = 3,85 km/s, c = 3×108 m/s et Δt0 = 1s, on a :
Ainsi la durée perçue sur Terre sera augmentée de 8,23×10-11s = 82,3×10-12s = 82,3 picosecondes. Soit environ -7,1x10-6 s par jours.
D=-7,1X10-6x3x108
Ce qui provoquerait un décalage d'environ 2100 m par jour
Le deuxième effet est une conséquence de la théorie de la relativité générale publiée par Einstein en 1915 : le temps s’écoule plus lentement dans un champ gravitationnel plus intense. Or nos satellites sont en altitude, et l’attraction gravitationnelle qu’ils subissent est environ 20 fois plus faible que la nôtre. Cet effet fait que leur temps est accéléré de 45 microsecondes par jour par rapport au nôtre.
Si on fait la somme nette de ces deux corrections, le temps qui s’écoule à bord des satellites est accéléré d’environ 38 microsecondes chaque jour. En multipliant par la vitesse de la lumière, on voit que si on ne prenait pas en compte cet effet, l’indication du GPS se décalerait d’environ 10km par jour.
Les moteurs
Fonctionnement du moteur électrique
Le moteur électrique est un dispositif électromécanique permettant de transformer l’énergie électrique en énergie mécanique. Il est composé de fils conducteurs placés à la périphérie d’un axe tournant. La façon de disposer les fils conducteurs permet de créer des forces. Ces dernières constitueront le couple moteur. Le moteur électrique joue donc sur les forces d'interactions entre un électro aimant un aimant permanent. L’électro aimant est alimenté par un courant continu grâce à la batterie pour mettre en rotation l'aimant. Contrairement à un moteur thermique où il y a une grande perte d’énergie, dans une moteur électrique 90% de l’énergie électrique provenant ( de la batterie) est transformé en énergie mécanique. Les seules pertes se font par effet Joules ou par les très faibles frottements. L'architecture d’un moteur d’une voiture électrique est beaucoup plus simple: il n'y a pas besoin de boîte de vitesse ou de composants pour convertir le mouvement vertical des pistons en mouvement rotatif. L'axe du moteur tourne directement sur l'axes des roues de la voiture électrique.


Vert: Véhicule électrique à batterie Rouge: moteur essence Vert et rouge: Véhicule électrique hybride rechargeable
Le fonctionnement du moteur à combustion
Ces moteurs sont aussi appelés « moteurs thermiques », car ils transforment une explosion dégageant énormément de chaleur en énergie mécanique. En effet, l’énergie dégagée par l’explosion d’un mélange de carburant et grâce à de nombreux composants permet de convertir le mouvement vertical des pistons en mouvement rotatif aux roues. Mais cela engendre de nombreuses pertes de rendement de 35% pour l'essence et de 40% pour le diesel, qui sont perdus sous forme de chaleur ou par les frottements à l’intérieur du moteur, au niveau des roues...
Le mélange combustible est composé de deux éléments essentiels : le carburant (l'essence), et le comburant (le dioxygène de l'air), qui va permettre cette combustion. Pour qu'il y ait combustion parfaite - c'est à dire qu'à la fin de la combustion il ne reste ni essence ni dioxygène - il faut que les éléments soient correctement dosés, c'est ce qu'on appelle le coefficient stoechiométrique. Ainsi la combustion complète du mélange dioxygène + essence produit de l'eau, du dioxyde de carbone, et de l'énergie provenant de la fission des molécules d'octane.
-
essence (octane) = C8H18
-
dioxygène = O2
-
eau = H2O
-
dioxyde de carbone = CO2
Équation (non équilibrée) de la combustion : C8H18 + O2 => CO2 + H2O
Équation équilibrée : 1C8H18 +12.5 O2 => 8 CO2 + 9 H2O
La combustion d’1 mole d'octane nécessite donc 12.5 moles de dioxygène pour produire exactement 8 moles de dioxyde de carbone et 9 moles d'eau.
C = 12 g/mol ; H = 1 g/mol ; O = 16 g/mol.
On peut donc connaître la masse d'une mole d'octane C8H18 : 8 x 12 + 18 x 1= 114 g.
(L'air que nous respirons n'est pas composé de 100% d'oxygène, mais d'environ 20% de dioxygène O2 et de 80% de diazote N2.)
Masse d'une mole d'air (O2+ 3.76 N2) : 2 x 16 + 3.76 x 2 x 14 = 137.28 g
Masse d'air nécessaire pour brûler une mole d'octane : 12.5 x 137.28 = 1716 g
Au final il faut donc 1716 g d'air pour 114 g d'essence, soit 1g d'essence pour 15.1 g d'air.
Dans la pratique, la valeur de référence utilisée sera 1 g d'essence pour 14.7 g d'air (l'essence ne contenant pas 100% d'octane, mais également de l'heptane et des additifs). La limite La maîtrise de la combustion repose avant tout sur le respect de ce dosage, qui conditionne la puissance, la pollution et la consommation.
Conclusion
Pour conclure, le conducteur humain est souvent distrait par son environnement entraînant des erreurs irréversibles or la voiture autonome permet de résoudre ce problème. Ainsi la voiture autonome est plus performante sur de nombreux points par rapport à la conduite humaine. Malgré cette évolution de la technologie de la voiture, beaucoup de défis demeurent afin de rendre cette voiture viable pour prendre la route et remplacer le conducteur humain. Il y a notamment des problèmes juridique en cas d’accident, y a t-il un risque de piratage des systèmes embarqués de ces voitures, les constructeurs peuvent-ils contrôler ces voiture à distance, le coût de ces voitures est encore un frein pour les consommateurs et peuvent les empêcher de passer à ce nouveau mode de déplacement. Mais malgré tout ça, la voiture autonome possède de nombreux avantages, ces voitures ont un meilleur temps de réaction que l’homme, cela permettrait une meilleur circulation en ville, et donc d’éviter la plupart des incidents qui sont généralement d’origine humaine.